아주대 연구진, 사이언스 표지 장식…해양탐사·재난구조 등 응용
[포쓰저널] 국내 연구진이 수면 위를 자유자재로 움직이는 곤충 ‘라고벨리아(부채다리 소금쟁이)’의 운동 비밀을 세계 최초로 규명하고, 이를 모방한 초소형 로봇을 개발하는 데 성공했다고 22일 과학기술정보통신부가 전했다.
이번 성과는 세계적 학술지 사이언스(Science) 이날자 표지 논문으로 실리며 국제적 주목을 받고 있다.
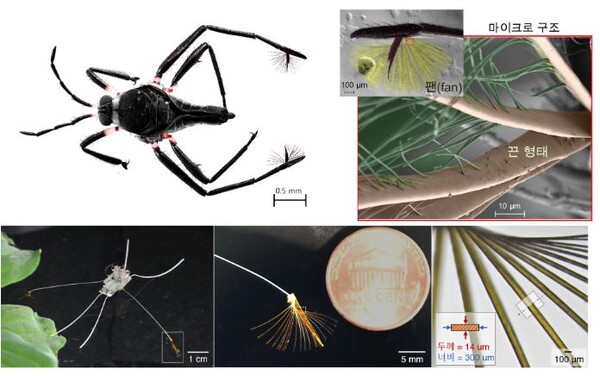
라고벨리아는 소금쟁이과 곤충 가운데에서도 빠른 물살 속에서 민첩하게 방향을 바꾸는 능력을 지닌 것으로 알려져 있다.
다리 끝의 부채꼴 구조가 순간적으로 펼쳐져 강력한 추진력을 만드는 것이 특징이지만, 그동안 이 구조가 어떤 원리로 0.01초 이내 초고속 변형을 이루는지는 미스터리로 남아 있었다.
아주대 고제성 교수 연구팀은 미국 UC버클리와 조지아공대 연구진과 협력해 이 비밀을 파헤쳤다.
연구 결과, 곤충의 다리 끝 부채는 근육의 힘이 아니라 탄성-모세관 현상(elastocapillarity)에 의해 자동으로 펼쳐지고 접힌다는 사실이 밝혀졌다.
물속에 닿으면 표면장력과 탄성이 상호작용해 즉시 펼쳐지고, 수면 위로 나오면 곧바로 접히는 자기형상변화(self-morphing) 구조라는 것이다.
연구팀은 이 원리를 실제 로봇 설계에 적용했다. 곤충 크기의 로봇 다리 끝에 21개의 끈 형태 인공 털로 만든 부채를 부착하고, 형상기억합금 기반 인공 근육을 구동기로 사용했다.
이 로봇은 무게 0.23g에 불과하지만, ▲초당 206도의 회전 속도 ▲체장 대비 1.96배 길이/초 전진 속도라는 성능을 보이며 기존 수상 마이크로 로봇보다 월등히 민첩한 제동과 방향 전환이 가능하다는 점이 입증됐다.
이번 연구는 단발적 성과가 아니라 고제성 교수가 박사과정 시절부터 15년간 꾸준히 이어온 소금쟁이 거동 연구의 성과라는 점에서 의미가 크다.
고 교수는 “자연계 곤충의 구조적 지능을 규명한 이번 연구는 환경 모니터링, 재난 구조, 생물모방 로봇공학 등 다양한 분야에 응용될 것”이라고 밝혔다.
과기정통부는 이번 성과가 ▲수생 마이크로 로봇 ▲환경 센서 ▲수질 탐사 ▲재난 현장 구조 활동 등 광범위하게 활용될 수 있다고 전망했다.
단순하면서도 효율적인 자기 전개형 구조를 제시한 덕분에, 향후 의학적 적용 가능성까지 제기된다. 물 표면이 존재하는 뇌·장기 내 초경량 의료기기나 생체 센서에도 설계 원리가 확장될 수 있다는 것이다.
사이언스가 표지 논문으로 선정한 것은 연구의 독창성과 파급력을 높이 평가한 결과다.
논문 제목은 “Ultrafast elastocapillary fans control agile maneuvering in ripple bugs and robots”로, 자연의 물리현상을 규명하고 이를 곧바로 기술 구현으로 연결한 사례라는 점에서 주목받았다.
이번 성과는 자연의 원리를 모방한 첨단 로봇공학이 어떻게 미래 사회에 기여할 수 있는지 잘 보여준다.
한국 연구진의 꾸준한 기초연구 투자가 세계적 성과로 이어진 만큼, 후속 연구와 산업적 응용이 빠르게 확산될 지 주목된다.