과기정통부, 우주물체 능동제어 선행기술 개발업체 모집
능동제어실증위성 개발, 2027년 누리호에 탑재해 발사
[포쓰저널=문기수 기자] 임무 수명이 끝나가는 인공위성을 수리하는 다관절 우주 로봇 개발이 정부 주도로 시작된다. 개발된 우주로봇은 2027년 발사되는 누리호에 탑재될 계획이다.
27일 과학기술정보통신부에 따르면 한국연구재단에서 우주물체 능동제어 선행기술 개발사업 온라인 설명회가 개최됐다.
우주물체 능동제어란 위성, 소행성 등 우주물체에 접근해 위치 또는 궤도를 변경하거나 연료 보급, 수리, 궤도 견인 등을 통해 우주자산(위성 등)의 임무수명을 연장하는 기술을 말한다.
이 기술을 활용하면 개발비용이 큰 대형 위성의 수명이 종료되더라도 상대적으로 적은 돈을 들여 궤도상에서 유지 보수를 통해 재사용이 가능하다.
과기정통부는 능동제어 핵심기술을 확보하기 위해 올해부터 ‘능동제어 실증위성’ 개발에 본격적으로 착수한다. 올해는 25억 원의 예산을 투자할 계획이다.
능동제어 실증위성이 개발되면 2027년 누리호에 탑재해 발사할 계획이다.
과기정통부와 한국연구재단은 20일부터 홈페이지를 통해 ‘능동기술 실증위성’ 개발을 책임질 주관연구기관 공모를 진행하고 있다.
연구개발계획서 접수기한은 3월4일부터 25일까지이며, 3월 말 평가를 통해 주관연구기관을 선정해 협약을 체결할 계획이다.
위성 등에 접근해 작업을 수행하기 위해서는 우주공간에서 수리나 작업을 진행할 다관절 로봇팔이나 그물을 발사해 우주쓰레기 등을 처리하는 기술 등이 필요하다.
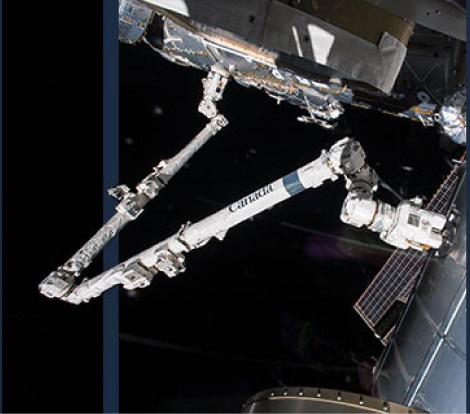
우주 선진국에서 쓰이고 있는 대표적인 로봇팔은 캐나다 우주국(CSA)가 국제우주정거장(ISS)에서 사용중인 Canadarm 시리즈이다. 1981년 우주왕복선 콜롬비아(STS-2)호에 처음 탑재된 이후 30년이상 임무를 수행하고 있다.
Canadarm시리즈는 발전을 거듭해 첫번째 시리즈인 Canadarm1은 지구로 귀환했고, 2가 ISS에서 사용되고 있다.
한국의 경우 우주물체 능동제어 관련 다관절 로봇팔 서비스 위성 구현, 우주 그물을 활용해 우주 쓰레기를 포획하는 기술 개발 등은 지상에서 기초 수준의 연구가 진행되고 있다.
최근에는 해당 분야에 많은 논문이 발표되는 등 연구자들의 관심도가 상승하고 있다.
과기정통부 노경원 연구개발정책실장은 “능동제어 실증위성을 통해 우주 선진국으로 도약하기 위한 핵심기술을 조기에 확보할 계획이며, 향후 궤도상 위성 지원 서비스 기술을 제공하는 우주 서비스 산업에 동 기술을 활용할 수 있을 것으로 기대한다”고 밝혔다.